
Page 252 - Guide du Dessinateur Industriel
P. 252
L.
62 préhension robotique
Pour des transferts de pièces par robots ou par bras mani- Pour des raisons de prix, de poids, de temps de réponse,
pulateurs, la préhension correcte de la piece au point de l'énergie pneumatique est très utilisée. Pour des raisons
vue géométrique, résistance, déformation et sécurité est de forces de serrage importantes, on utilise l'énergie hydrau-
primordiale. Parmi les principaux préhenseurs, on distingue lique. Pour des raisons de souplesse des mouvements et de
essentiellement les pinces, les ventouses et les aimants. propreté, on utilise l'énergie électrique.
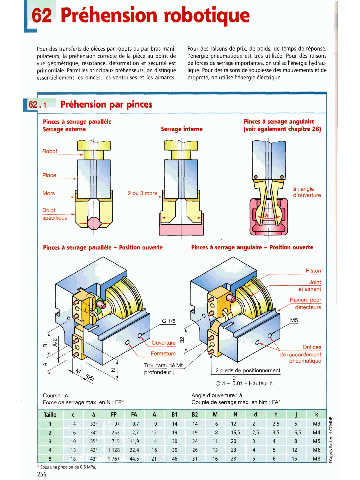
préhension par pinces
Pinces à serrage paralléle Pinces à seirage wguiaim
Serrage cxierne (voir égaiement chapitre 28)
Pinm à serrage parakie - Porition ouverte Pinces à renage angulaim - Poaitii ouverte
cmaœ
*-
pririumatlw
O
0 d - 0.01 - Hauteur h
Course : c Angle d'ouverture : â
Force de serrage max. en N : FP* Couple de serrage max. en Nm : FA'
' Sous une pression de 0,6 MPa.
256