
Page 153 - Guide du Dessinateur Industriel
P. 153
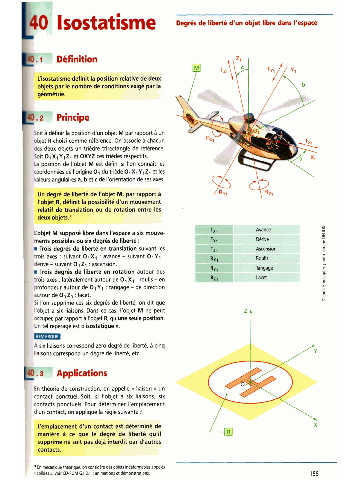
lsostatisme DcgrCI de libett4 d'un objet libre dans l'espace
Définition
Btisme définit la position relative de deux
i par iombre de conditions exigé par la
-
b principe
Soit à définir la position d'un objet M par rapport à un
objet R choisi comme référence. On associe à chacun
des deux objets un trièdre trirectangle de référence.
,bit Ol X1 Y1 Z1 et OXYZ ces trièdes respectifs.
b position de i'objet M est défini si I'on connair les
coordonnées de l'origine 01 du triède O1 XIYIZl et les
valeurs angulaires a, b et c de l'orientation de ses axes.
. . ,, .iberté de l'objet M,,gar rap,".. à
~bje définit la possibilité d'un mswrement
eux Objets-* *
!latif de translation ou de rotation, entre les
i!objet M supposé libre dans l'espace a six mouve
inents possibles ou six degrés de liberté :
r Trois degrés de liberté en translation suivant les
bis axes : suivant OIX1 : avance - suivant OIY1 :
dérive - suivant 0, Zl : ascension.
a Trois degrés de liberté en rotation autour des
trois axes : latéralement autour de O1 X1 : roulis - en
profondeur autour de O, YI : tangage - de direction
autour de 01 Z1 : lacet.
Si I'on supprime ces six degrés de liberté, on dit que
i'objet a six liaisons. Dans ce cas, I'objet M ne peut
occuper, par rapport à i'objet R, qu'une seule position.
Un td repérage est cc isostatique W.
A six liaisons correspond zéro degré de liberté, à cinq
liaisons correspond un degré de liberté, etc.
Applications
En thbrie de construction, on appelle « liaison » un
contact ponctuel. Soit, si I'objet a six liaisons, six
-
contacts ponctuds. Pour déterminer l'emplacement
d'un w'-3, or --dique la règle r-!vanta
L'emplacement d'un contact est déterminé de
manière A ce que le degré de liberté qu'il
clipprime ne soit pas déjà interdit par d'autre<
mtacts.
En mécanique théorique, on considère des objets indéforniables appel&
1 a solides r Voir Cü-ROM G.1.û.I. : animations eî d6mnstrations.