
Page 128 - HPC 1 élèments Mécaniques
P. 128
Amortisseurs
Formules et exemples de calcul
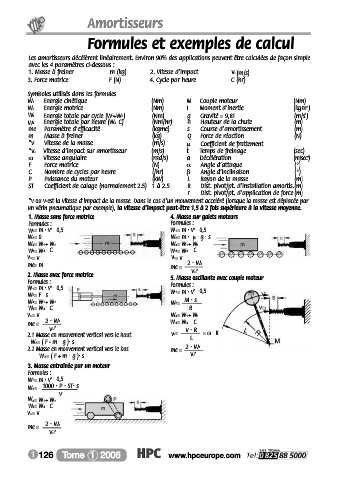
Les amortisseurs décélèrent linéairement. Environ 90% des applications peuvent être calculées de façon simple
avec les 4 paramètres ci-dessous :
1. Masse à freiner m (kg) 2. Vitesse d’impact vD(m/s)
3. Force motrice F (N) 4. Cycle par heure C (hr)
Symboles utilisés dans les formules
W1 Energie cinétique (Nm) M Couple moteur (Nm)
W2 Energie motrice (Nm) I Moment d’inertie (kgm ) 2
W3 Energie totale par cycle (W1+W2) (Nm) g Gravité = 9,81 (m/s ) 2
W4 Energie totale par heure (W3 C) (Nm/hr) h Hauteur de la chute (m)
me Paramètre d’efficacité (kgme) s Course d’amortissement (m)
m Masse à freiner (kg) Q Force de réaction (N)
*v Vitesse de la masse (m/s) μ Coefficient de frottement
*vD Vitesse d’impact sur amortisseur (m/s) t Temps de freinage (sec)
ω Vitesse angulaire (rad/s) a Décélération (m/sec ) 2
F Force motrice (N) α Angle d’attaque (°)
C Nombre de cycles par heure (/hr) β Angle d’inclinaison (°)
P Puissance du moteur (kW) L Rayon de la masse (m)
ST Coefficient de calage (normalement 2.5) 1 à 2.5 R Dist. pivot/pt. d’installation amortis.(m)
r Dist. pivot/pt. d’application de force(m)
*v ou vD est la vitesse d’impact de la masse. Dans le cas d’un mouvement acceléré (lorsque la masse est déplacée par
un vérin pneumatique par exemple), la vitesse d’impact peut-être 1,5 à 2 fois supérieure à la vitesse moyenne.
1. Masse sans force motrice 4. Masse sur galets moteurs
Formules : Formules :
W1 = m . v . 0,5 W1 = m . v . 0,5
2
2
W2 = 0 W2 = m . μ . g . s
W3 = W1 + W2 W3 = W1 + W2
W4 = W3 . C W4 = W3 . C
vD = v vD = v
me= m me = 2 . W3
vD 2
2. Masse avec force motrice 5. Masse oscillante avec couple moteur
Formules : Formules :
2
W1 = m . v . 0,5 W1 = m . v . 0,5
2
W2 = F . s
W3 = W1 + W2 W2 = M . s
W4 = W3 . C R
vD = v W3 = W1 + W2
me = 2 . W3 W4 = W3 . C
vD 2 v . R
2.1 Masse en mouvement vertical vers le haut vD = = ω . R
L
W2 = ( F - m . g ) . s
2.2 Masse en mouvement vertical vers le bas me = 2 . W3
W2 = ( F + m . g ) . s vD 2
3. Masse entraînée par un moteur
Formules :
2
W1 = m . v . 0,5
1000 . P . ST . s
W2 =
v
W3 = W1 + W2
W4 = W3 . C
vD = v
me = 2 . W3
vD 2
HPC
➊ 126 Tome 1 2006 HPC
HPC www.hpceurope.com