
Page 242 - Guide du Dessinateur Industriel
P. 242
Ln Moteurs électriques
1
L'entraînement en rotation d'éléments de machines est I
fréquemment réalisé par des moteurs électriques.
E
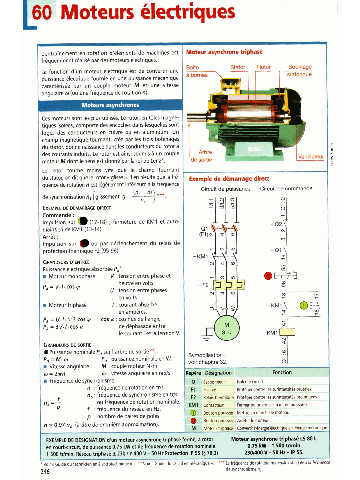
La fonction d'un moteur électrique est de convertir une - Stator Rotor Bobinage
puissance électrique fournie en une puissance mécanique d
caractérisée par un couple moteur M et une vitesse
angulaire w (ou une fréquence de rotation n).
Ces moteurs sont les plus utilisés. Le rotor, en tôles magné
tiques isolées, comporte des encoches dans lesquelles sont
logés des conducteurs en cuivre ou en aluminium. Un
champ magnétique tournant, créé par les trois bobinages
du stator, donne naissance dans les conducteurs du rotor à
des courants induits. Le rotor est ainsi soumis A un couple
moteur M dont le sens est donné par la loi de Lenz*.
quence de rotation n est légèrement inférieure A la fréquence 1
Le rotor tourne moins vite que le champ tournant
du stator, on dit que le rotor c glisse D. II en résulte que la fré-
Exempfe de d8maingc dhct
I de synchronisation n, glissement g = - Circuit de puissance Circuit de commande
EXEMPLE DE DÉMARRAGE DIRECT
Commande :
Impulsion sur (17-18) ; fermeture de KM1 et auto-
maintien de KM1 (13-14).
OU par déclenchement du relais de 1
1 K:kion sur
1 protection therm%ue F2 (95-96). I
GRANDEURS D'ENTRÉE
Puissance électrique absorbée Pa*.
m Moteur monophasé V : tension entre phase et
neutre en volts.
U : tension entre phases
en volts.
m Moteur triphasé 1 : courant absorbé
en ampères.
Pa = Y. i. Yj cos Q cos Q : cosinus de l'angle
Pa = 3V.l.cos Q de déphasage entre
le courant I et la tension V.
GRANDEURS SORTIE
DE
Puissance nominale P, sur l'arbre de sortie**.
P,,=M.w P,, : puissance nominale en W. Symbolisation :
voir chapitre 32.
i Vitesse angulaire M : couple moteur N .m.
w = 2mn w : vitesse angulaire en rad/s.
m Fréquence de synchronisme der le circuit.
n : fréquence de rotation en tris.
Fusible
n, : fréquence de 'ynchronisme en tris
f
n, = - ou fréquence de rotation nominal ,
P f : fréquence du réseau en Hz.
..-
p : nombre de paires de pôles. -
n = 0.97 n, (A titre de première approximation). triphasé Comrwti'r i'énergiemue en énergie mécan'q
MENlPLE DE D&GNATKN d'un moteur asynchrone Mphase ter&, a rotor Moteur asynchrone Mphasé LS 80 L
en court-circuit, de puissance 0,75 kW et de fréquence de rotation nominale 0,75kW-l500blmhi
1 500 tr/min. Réseau triphasé A 230 /Y 400 V - 50 Hz Protection IP 55 (5 78.2) 230/400V-5OHr-IP 55,
* Voir (( Guide du technicien en électrotechnique N. ** Voir (( Guide du calcul en mécanique u. '** La fréquence de mtation nominale est &ale a la fMuence
246 de synchronisme n,.