
Page 12 - Composants Electrique
P. 12
Principe de fonctionnement
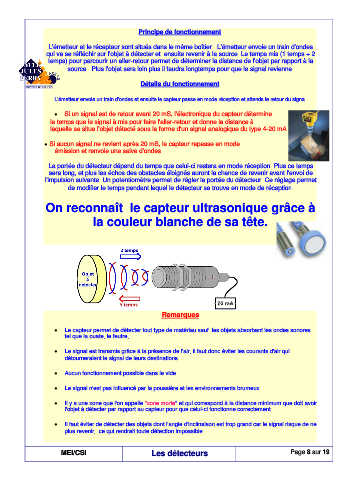
L'émetteur et le récepteur sont situés dans le même boîtier. L'émetteur envoie un train d'ondes
qui va se réfléchir sur l'objet à détecter et ensuite revenir à la source. Le temps mis (1 temps + 2
temps) pour parcourir un aller-retour permet de déterminer la distance de l'objet par rapport à la
source. Plus l'objet sera loin plus il faudra longtemps pour que le signal revienne.
Détails du fonctionnement
L'émetteur envoie un train d'ondes et ensuite le capteur passe en mode réception et attends le retour du signal.
• Si un signal est de retour avant 20 mS, l'électronique du capteur détermine
le temps que le signal à mis pour faire l'aller-retour et donne la distance à
laquelle se situe l'objet détecté sous la forme d'un signal analogique du type 4-20 mA.
• Si aucun signal ne revient après 20 mS, le capteur repasse en mode
émission et renvoie une salve d'ondes.
La portée du détecteur dépend du temps que celui-ci restera en mode réception. Plus ce temps
sera long, et plus les échos des obstacles éloignés auront la chance de revenir avant l'envoi de
l'impulsion suivante. Un potentiomètre permet de régler la portée du détecteur. Ce réglage permet
de modifier le temps pendant lequel le détecteur se trouve en mode de réception.
On reconnaît le capteur ultrasonique grâce à
la couleur blanche de sa tête.
Remarques
• Le capteur permet de détecter tout type de matériau sauf les objets absorbant les ondes sonores
tel que la ouate, le feutre,...
• Le signal est transmis grâce à la présence de l'air, il faut donc éviter les courants d'air qui
détourneraient le signal de leurs destinations.
• Aucun fonctionnement possible dans le vide.
• Le signal n'est pas influencé par la poussière et les environnements brumeux.
• Il y a une zone que l'on appelle "zone morte" et qui correspond à la distance minimum que doit avoir
l'objet à détecter par rapport au capteur pour que celui-ci fonctionne correctement.
• Il faut éviter de détecter des objets dont l'angle d'inclinaison est trop grand car le signal risque de ne
plus revenir, ce qui rendrait toute détection impossible.
MEI/CSI Les détecteurs Page 8 sur 19